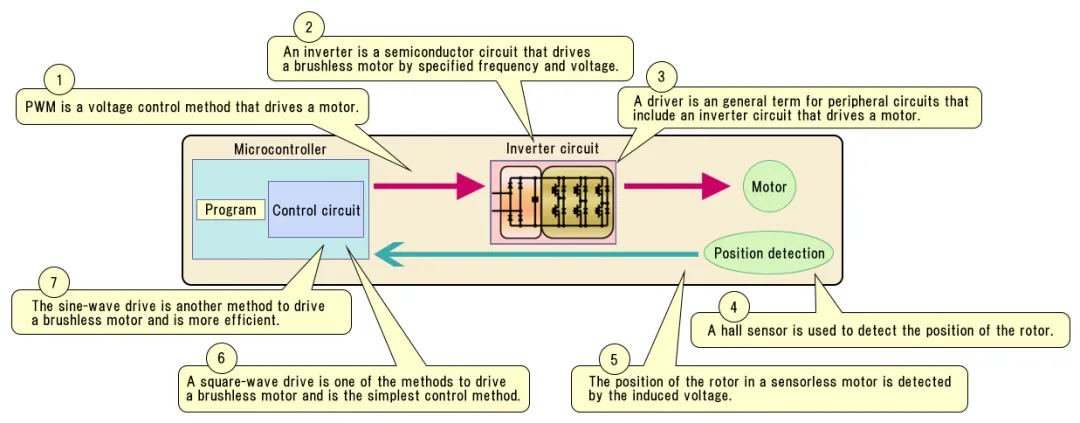
通過上篇無刷馬達概述篇中,大家應該可以初步的瞭解無刷馬達的基本驅動原理以及無刷馬達運行狀態,在此篇以及下篇中我們將解析無刷馬達是如何工作的呢!讓我們繼續看下去! 圖1展示了一個典型的無刷馬達基本系統,在這個系統中包含了四個功能單元,分別是微控制器(MCU)單元、逆變器電路、馬達和位置檢測。這四個單元詮釋了一個基本無刷馬達系統的主要結構和工作狀態流程(參考箭頭方向)。
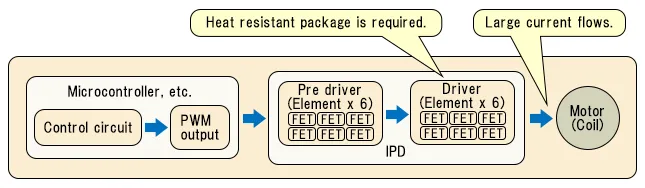
圖1 無刷馬達基本系統結構圖 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/HQ7l05SiaG9Ajy6ud6wO-A 在圖1的無刷馬達工作流程中,首先是從MCU輸出PWM信號作為驅動馬達的電壓控制邏輯到逆變器,經由逆變器晶片以特定的頻率和電壓驅動無刷馬達(驅動電路是包括逆變器電路在內的所有週邊電路的統稱)。驅動電路輸出的信號傳遞到馬達後即開始整個馬達的工作,在馬達工作開啟後,霍爾感測器用來檢測馬達轉子的位置資訊,在無感測器馬達中轉子的位置則由感應電壓檢測,檢測到的轉子位置資訊將傳送回MCU單元,在MCU單元的控制電路中,最簡單的驅動方法是方波驅動。而相較于方波,正弦波驅動方法的效率更高。 除上述的說明外,我們還需要關注幾個關鍵資訊 在無刷馬達的工作流程中,PWM(脈衝寬度調製)用於控制馬達線圈內的電力,通過反復打開和關閉輸出來控制輸出功率。恒定電壓下,以恒定的脈衝週期運行馬達,馬達線圈中產生的電壓取決於電壓脈衝的寬度。它利用了半導體的特性,即開關狀態的損耗最小,而中間狀態的損耗最大。由於PWM控制具有優異的可控性和較高的效率,在逆變電路中得到了廣泛的應用。此外,它還可以用於控制直流有刷馬達。在逆變電路中,通過週期性地改變PWM控制的打開狀態(占空比),可以產生最適合驅動馬達的正弦波交流電壓。 逆變器是進行功率轉換的裝置,我們把負責將直流電轉換為交流電的設備稱為DC-AC逆變器。通常,通過組合AC-DC轉換器和DC-AC逆變器來轉換指定頻率和電壓的電路稱為逆變電路(逆變器)。馬達系統中的逆變器單元通過高效的驅動和平穩的旋轉實現寬範圍的轉速,由於輸出電壓和輸出頻率可以任意控制,所以被廣泛用於控制交流馬達和無刷馬達的轉速,實現了低功耗、高效率的驅動。 驅動IC是一種驅動馬達的逆變電路,其結構如圖2所示。例如,一台3相小馬達有6個功率元件和6個二極體。功率元件有電晶體、FET、IGBT等。由於實際驅動馬達的是大電壓、大電流,所以需要一個驅動電路將控制電路的PWM輸出轉換為高電壓、大電流。由於驅動馬達的FET和IGBT等功率元件需要12V左右的大驅動電流來驅動,因此需要一個預驅電路。低電壓的小功率馬達可以在沒有預驅電路的情況下驅動。
圖2 驅動IC的實際示意 / 作者:東芝半導體 / 出處https://mp.weixin.qq.com/s/HQ7l05SiaG9Ajy6ud6wO-A 在此篇的介紹中,我們跟大家一起熟悉了無刷馬達的基本組成單元,以及PWM和逆變器單元在馬達工作流程中的作用。 |